近年来,随着单片机在我国的推广,以其的简单实用、功能强、体积小而日益广泛的被广大设计师采用,尤其在工业控制领域中应用更为突出 。笔者结合实际利用美国Atmel 公 司的20管脚 处理器A T89C2051 设计了一套超声波倒车测距系统 。该系统由信号处理单元、微机控制单元组成,简易而又实用,应用较广。这里着重介绍微机控制单元的软硬件设计,并给出了软件流程,以此为基础可根据自己的需要作相应扩展。
1 系统构成及工作原理
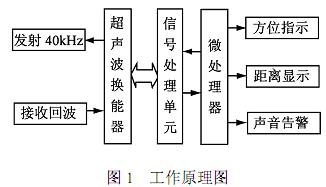
该系统的工作原理:由微机编程送出40k Hz 频率的方波信号至信号处理器,信号处理器通过两级放大,再经过压电换能器将信号发射出去,该信号遇到障碍物反射回来在此称为回波。同时,压电换能器将接收的回波通过信号处理的检波放大、积分整形及一系列常见电路的处理,送至微机处理。显示器的声音告警频率、发光二极管方位指示及障碍物距超声波探头的距离显示均由单片机控制。总的工作原理方框示意图如图1所示。
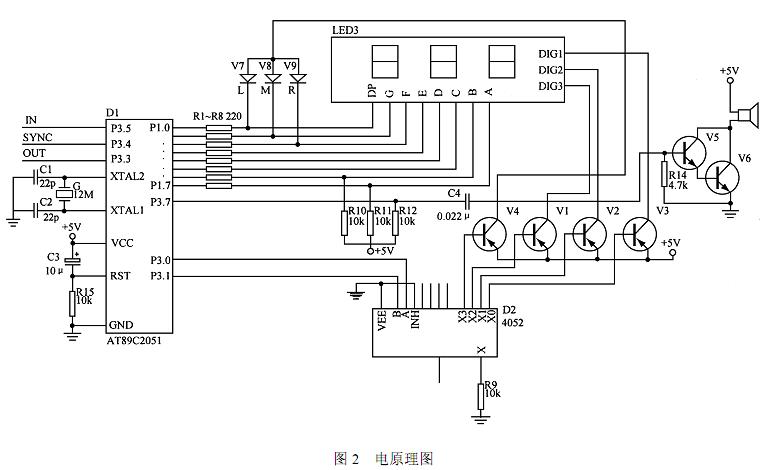
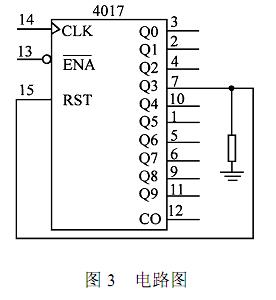
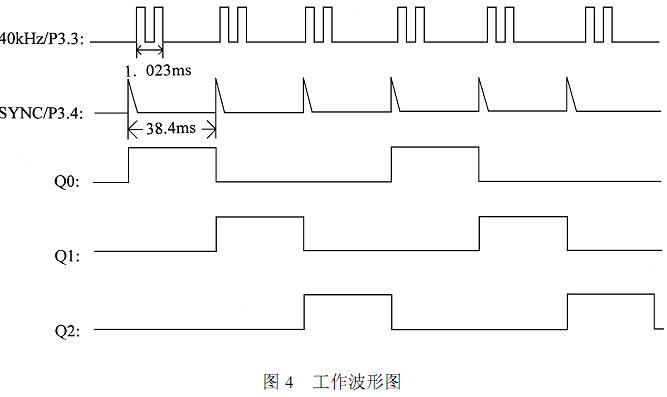
工作原理:用I/O口P3.3 作测试从P3.3 端口编程输出 40k Hz 的方波信号1.023ms,然后开定时器 1 定时,检测 P3.5 回波输入端有回波信号时,读该时刻定时器1 的定时值,即能求出从发出超声波至收到回波之间的时间T,根据公式 S = TC 即可得到障碍物距汽车的距离,其中C 声波的速度340m/s,S 为所需的距离。为了测量的准确,这里在汽车尾部装了三个超声波换能器,轮流检测,组成12 节循环链表,求每个超声波探头四次测得值的平均值,以减小误差,再比较三个探头平均值,最小的值即为最近的障碍物反射回来回波所需的时间。电原理图如图2 所示,其中图2 中的P3.4 即SYNC同步周期端接一循环移位计数器的CLK端,Q0 、Q1、Q2 输出分别控制三个超声换能器使它轮流工作,电路图及工作波形图如图 3 、4 所示。
2 软件设计
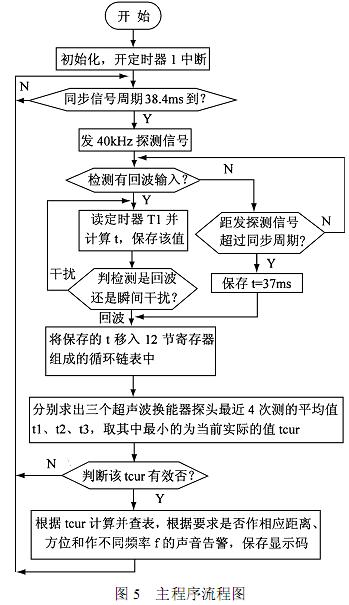
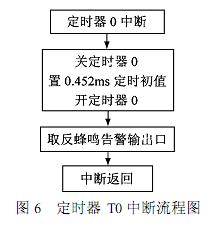
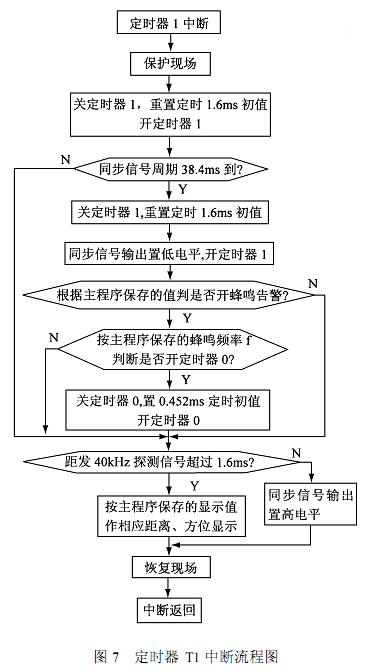
系统软件由主程序、定时器1中断程序、定时器0中断程序构成。主程序用于循环检测并且保存测量的结果以及计算的相关参数于寄存器中,定时器T1主要用于计时测量的时间和根据主程序的保存的测量及计算的一系列参数作显示报警等处理。定时器T0用于产生蜂鸣器报警的脉冲。该程序充分利用了AT89C2051的有限资源。独到之处为查表程序的应用及定时器的应用。系统主程序流程如图5所示,定时器T1、T0中断服务程序分别如图6、7所示。
该系统经过大量实验数据测试表明系统满足设计要求,通过修改部分子程序可根据需要扩展成六通道、二通道、单通道的汽车后视仪及根据不同的要求作不同的报警处理。例如在该设计中加入了一时钟芯片X1203,通过添加一些程序就可以实现时钟显示与倒车报警的二合一产品。