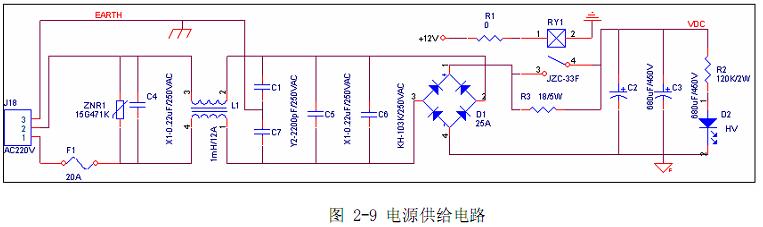
2.2.8 电源供给电路
电源供给电路采用传统的EMI 滤波电路,电容C4、C5、C6 主要用于滤除差模干扰,而电容C1、C7、共模扼流圈则既可滤除共模干扰,又可虑除差模干扰;继电器JZC-33F 与电阻R3为软启缓冲电路,主要用于抑制上电瞬间的电流冲击,保护整流桥不被烧毁。如图2-9:
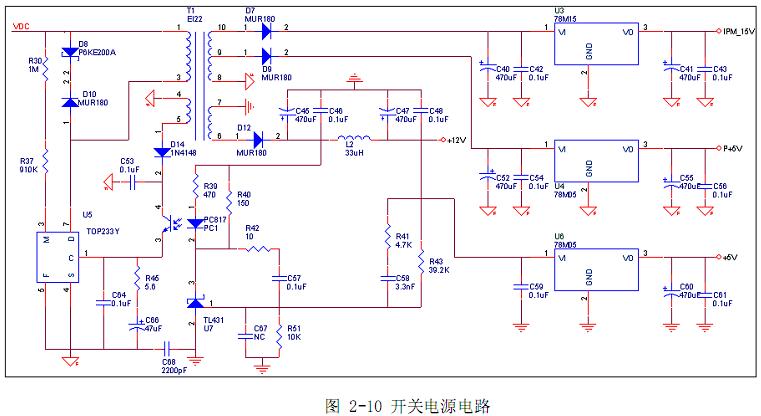
2.2.9 开关电源电路
电源供给电路采用高效率的开关电源,以 TOP233Y 为主控元件,为系统提供低压工作电源和 IPM 驱动电源,如图 2-10。
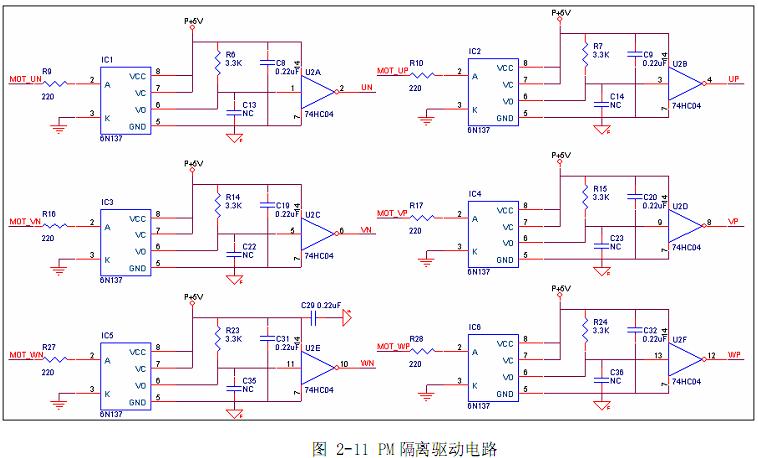
2.2.10 IPM 隔离驱动
图 2-11 是 IPM 隔离驱动电路,实现高压直流和 MCU 部分的电气隔离,保护 MCU。图中的6N137 为高速光耦,其完成 PWM 信号的隔离,为了保证驱动能力,在光耦过后使用 74HC04 将信号反向并增强其驱动能力。由于 SPMC75F2313A单片机具有自动插入死区功能,所以隔离驱动电路在硬件上没有必要再插入死区。
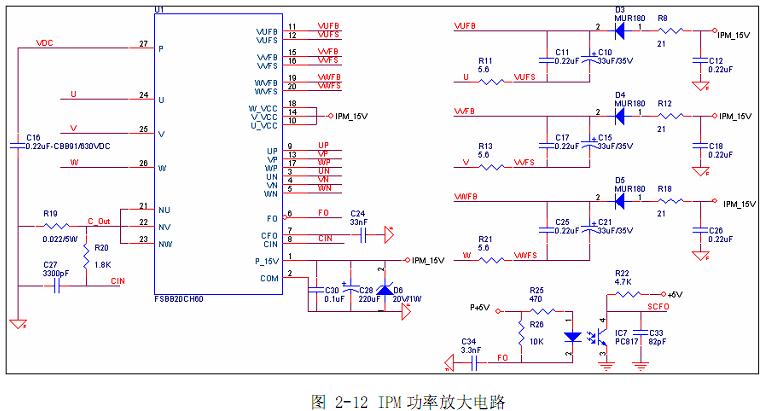
2.2.11 IPM 功率放大电路
如图2-12, 功率模块采用美国Fairchild公司的6单元智能功率模块FSBB20CH60, , 它最大耐压600V,最大电流 20A,并具有过压、过流、短路及过热保护功能。为了简化开关电源设计的复杂程度,IPM驱动电源采用自举电源形式,整个 IPM 只用一路 15V 驱动电源即可。
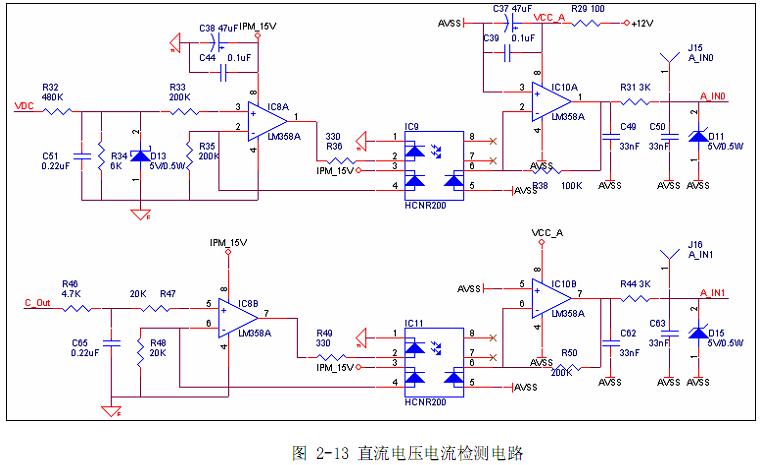
2.2.12 直流电压电流检测
直流电压电流检测电路原理如图 2-13所示,电流和电压信号经 LM358 和HCNR200 后变为电流信号,再经LM358 转换成电压信号后送到MCU的IOA2、IOA3,实时监视直流电压和电流。
3 程序结构
3.1 感应马达 V/F控制
3.1.1 感应马达 V/F 控制原理
在电机调速时,最重要是要保持磁通 m Φ 为额定值不变。在直流电机中,励磁系统独立,只要对电枢进行合适的补尝,保 m 持Φ 不变很容易。而在交流异步电机中,磁通是定子和转子的磁势合成的。而且满足:
Eg = 44.4f1N1kNΦm (3-1)
式中:
Eg ——气隙磁通在定子每相中的感应电动势的有效值;
f1——定子频率;
N1 ——定子每相绕组的串联匝数;
1N k ——基波绕组系数;
Φm——每极气隙磁通量;
由式(3-1)可知,只要控制好Eg 和f1,便可达到控制磁通 Φm的目的,为此,得考虑基频以下和基频以上两种工作情况。
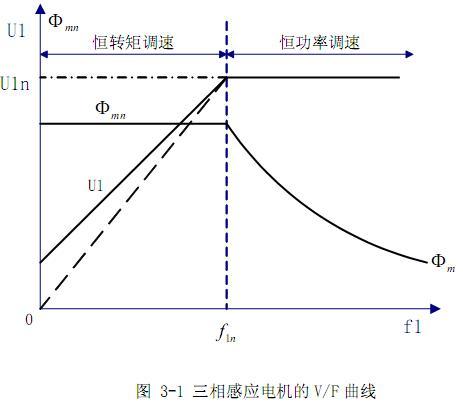
- 基频以下调速
由式(3-1)可知,只要保持Eg / f1 为常值,就可以保持 Φm 不变。但是,绕组中的感应电动势是很难直接控制的,在电动势较高时可以忽略定子绕组的阻抗压降而认定 U1 ≈ Eg ,则有 U1/ f1 = 常值;在频率较低时 U1 和 Eg 都比较小,这时不能忽略,可以人为的抬高 U1 去补尝定子绕组的阻抗压降。
- 基频以上调速
当基频以上调速时,频率往上升高,但 U1 却不能比额定电压 U1n还要大,顶多只能使 U1 = U1n。因此,由式(3-1)可知,这将迫使磁通与频率成反比,相当于直流电机弱磁升速的情况。
将以上二种情况结合起来就可以得到异步电机如图 3-1 所示的变频调速特性。同时这也是变频电机调速的V/F 曲线图。在实际运用中,V/F开环控制也是沿着这条曲线进行的。
3.1.2 三相 SPWM生成原理
要使三相感应马达正常运行,需要使其电枢绕组通以三相交变电流,以产生圆形旋转磁场。产生三相交变电流的方法有很多,本例中使用SPWM来产生三相正弦电流。图 3-2 是三相 SPWM 生成原理:
.JPG)
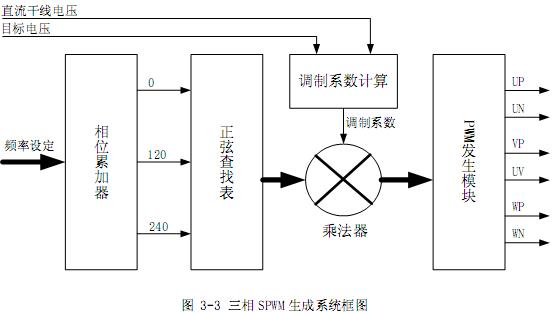
使用 DDS(直接数字频率合成)的方式产生 SPWM。如图 3-3 所示,整个系统是一个典型的 DDS 频率合成系统,只不过用 PWM 发生模块去替换了传统的 DAC。在本系统中波形数据表的大小为 1024 点,PWM载波频率为3~10KHz。另外,较大的数据表有利于保证低频时的波形精度。
3.2 程序总体介绍
3.2.1 参数及硬件初始化
这部分主要是对电机驱动相关的硬件和一些静态参数进行初始化。主要初始化MCP4、与MCP4的PWM输出相关的IO口、与MCP4的PWM输出相关的中断、SPWM发生的相位累加器、相位增量寄存器、幅度调制系数、各种状态标志和V/F曲线参数表。
3.2.2 参数计算
这部分主要是根据设定的频率查询V/F曲线表并线性插值计算设定频率下所需的电压,并根据当前的干线电压计算与之对应的幅度调制系数。如果设定频率比系统设定的最低频率小,则输出电压为设定的最小值,如果计算出的调制系数大于或等于1则调制系数等于1。
3.2.3 频率变化的平滑处理
频率和电压的突变会引起过大冲击电流,对系统造成损害。因此,为了防止参数更改时频率和电压的突变时的冲击电流,系统对频率和电压的变化进行了滤波处理,实现系统的软起动、软过度。系统会定时(这个时间根据加减速时间计算)检查当前的设定频率是否和目标工作频率相等,如不等则以一定的速度(这个时间根据加减速时间和基频频率计算)逼近目标频率,直至目标频率。
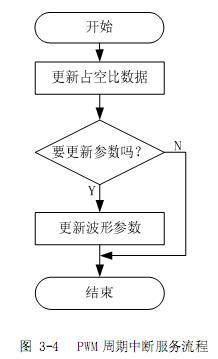
3.2.4 PWM 周期中断服务
PWM周期中断服务流程如图3-4所示。由于系统工作频率更改时,相应有多个工作参数更改,为了防止在参数修改过程被PWM周期中断打断,同时又要保证PWM周期中断的实时响应,系统使用参数先预修改而后在PWM周期中断中同步更新的方式来解决这一问题。