1、引言
VxWorks操作系统是WindRiver公司开发的一种高性能的嵌入式实时操作系统。它带有一个功能强大的集成开发系统环境Tornado。VxWorks具有软件生成代码小、实时性强及响应速度快等特点,特别适合于具有实时和多任务要求的系统。VxWorks自20世纪80年代问世以来,以其高性能、高可靠性、高实时性等特点成为实时操作系统中最具特色的系统。自1996年登陆中国,短短几年就已成为国防、工业自动化、网络通信、航空航天、医疗仪器、状态监控以及消费电子产品等嵌入式实时领域的首选操作系统。由于嵌入式实时操作系统在内核方面具有自身的特点,本文着重对实时内核中任务调度进行了详细分析。
2、任务调度概述
2.1 调度的概念
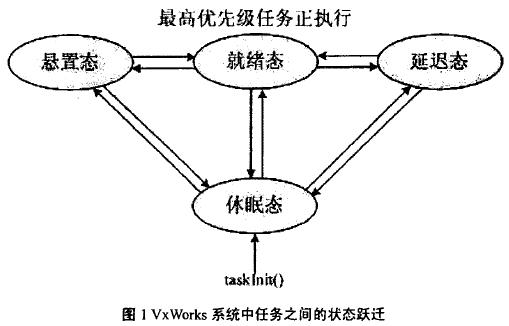
构成应用软件系统的程序集合中,独立的、相互作用的程序单元,在其执行时称之为任务。单个CPU 中,多任务机制制造了一个多个任务同时执行的假象。其实系统只是根据一个多任务调度算法,将内核插入到这些任务中执行。实时系统VxWorks的一个任务可有多种状态,但最基本的状态有以下四种:
1) 就绪态(Ready):任务只等待系统分配CUP资源。
2) 挂起态(Pend):任务需等待某些不可利用的资源而被阻塞。
3) 休眠态(Sleep):如果系统不需要某一个任务工作,则这个任务处于休眠状态。
4) 延迟态(Delay):任务被延迟时所处的状态。
当系统函数对某一个任务进行操作时,任务从一种状态跃迁到另一种状态。处于任一状态的任务都可被删除。VxWorks的任务跃迁如图1所示。
任务由系统内核调度运行一段固定长度的时间,称为时间片。调度是指为任务分配资源和时间,使系统满足特定的性能要求。调度算法的目的是在正常情况下,尽可能满足所有任务的时限:在峰值负载条件下,保证强实时任务满足时限。因为时限是区分实时系统和非实时系统的关键因素,因此调度算法是实时系统的基本问题。实时操作系统所具有的运行性能,如吞吐量的大小、周转时间的长短、相应的及时性和可预测性等在很大程度上都取决于实时调度。
2.2调度的类型
虽然调度的主要目的都是为了分配处理机,但在不同的OS中所采用的调度方式是完全不同的。在执行调度时所采用的调度算法也可能不同。因此,常按照调度的层次把调度分成高级、中级和低级调度。
高级调度又称长程调度或作业调度,用于决定把外存上处于后备队列中的哪些作业调入内存,并为它们创建进程、分配必要的资源,然后再将新创建的进程排在就绪队列上,准备执行。然而在实时系统中,为了能及时响应,用户通过键盘输入的数据都是直接送入内存,因而实时系统通常不需要作业调度。
中级调度又称中程调度,引入它的主要目的是为了提高内存利用率和系统吞吐量。它使那些暂时不能运行的进程不再占用宝贵的内存空间,而将它们调到外存上去等待,此时的状态称为挂起状态。当这些进程重新具备运行条件,且内存又有空闲,由中级调度决定,将外存上的那些重新具备运行条件的就绪进程重新调入内存,并使它为就绪状态,挂在就绪队列上等待进程调度。
低级调度又称进程调度。它决定就绪队列中的哪个进程将获得处理机,然后由分派程序执行把处理机分配给该进程的操作。进程调度是最基本的一种调度,各种OS中都必须配置这级调度。进程调度可采用下述两种方式。
1)非抢占方式。采用这种调度方式,一旦把处理机分配给某进程后,便让该进程一直执行,直到该进程完成或发生某事件而被阻塞,才再把处理机分配给其他进程,决不允许某进程抢占已经分配出去的处理机。显然它难于满足紧急任务的要求,实时系统中不宜采用这种调度方式。
2)抢占方式。允许调度程序根据某种原则,去停止某个正在执行的进程,将已分配给该进程的处理机,重新分配给另一进程。抢占的原则有:
① 时间片原则。各进程按时间片运行,当一个时间片用完后,便停止该进程的执行而重新进行调度。
② 优先权原则。当一个进程到来时,如果其优先级比正在执行的进程的优先级高,便停止正在执行的进程,将处理机分配给优先级高的进程,使之执行。实时系统中一般采用基于优先级的抢占式调度和轮转调度的进程调度和中程调度相结合的调度策略。因此既可具有较大的灵活性,又能获得极小的调度延迟。
3、任务调度分析
Wind内核缺省调度机制为基于优先级的抢占式调度。采用这种机制时,系统把处理机分配给优先级最高的进程,使之执行。一旦出现了另一个优先级更高的进程时,进程调度程序剥夺当前任务的执行,将处理机分配给高优先级任务。而在相同优先级的多个任务之间,采用时间片轮转调度机制。采用这种机制时,当一个任务到达时,它被排在轮转队列的后面,等待分配给自己的时间片的到来,如果在时间片内没有结束,则再等待属于自己的时间片的到来,直到任务完成。
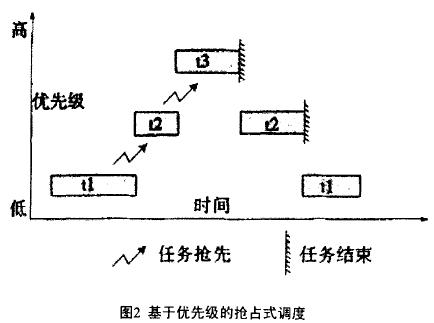
3.1 优先级抢占式
采用基于优先级的抢占式调度,系统中每个任务都有一个介于最高0到最低255之间的优先级。任一时刻,系统内核一旦发现一个优先级更高的任务转变为就绪态,内核就保存当前任务的上下文并把当前任务状态转换为阻塞态,同时切换到这个高优先级任务的上下文执行。如图2,低优先级的task1被中优先级的task2抢占,task2又被高优先级的task3抢占。
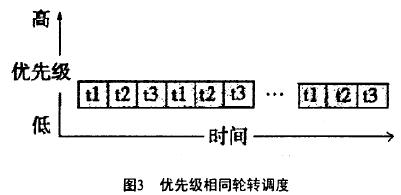
3.2 轮转调度算法
采用轮转调度算法,系统让处于就绪态的优先级相同的一组任务依次轮流执行预先确定长度的时间片。这是一种处理机平均分配的方法。如果不使用轮转调度算法,优先级相同的一组任务中第一个获得处理机的任务将不会被阻塞而独占处理机,如果没有阻塞或其他情况发生,它不会放弃处理机的使用权。如图3,相同优先级的task1、task2和task3平均分配预先确定的处理机时间片。
3.3 抢占调度与轮转调度混合方式
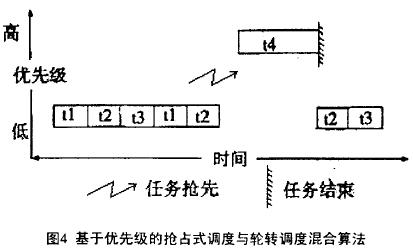
有时,基于优先级的抢占式调度可与轮转调度相结合。当优先级相同的一组任务依次轮流平均分配处理机时,若有高优先级的任务转变为就绪态则可抢占该组任务。直到再一次符合执行条件时,该组任务才可再次共享处理机。如图4,相同优先级的task1、task2和task3轮流占有处理机时,高于该组优先级的task4抢占处理机,等task4执行结束,该组任务再次共享处理机。
为了任务控制的灵活性,wind内核还提供了动态优先级机制,任务的优先级在运行期间可动态地变化。同时,为了防止优先级反转,还具有优先级继承机制,通过使用互斥信号量可以防止高优先级的任务被迫等待一段不确定时间,直到一个低优先级任务完成。